|
|
|
 |
| 地区分布:滁州、安徽、宣城、池州、巢湖、六安、黄山、安庆、铜陵、芜湖、淮南、蚌埠、阜阳、宿州、合肥、马鞍山、淮北、澳门、北京、宁德、福建、泉州、漳州、龙岩、福州、南平、莆田、厦门、三明、兰州、甘肃、嘉峪关、金昌、宁夏、韶关、广东、潮州、梅州、河源、清远、珠海、汕尾、东莞、佛山、深圳、广州、汕头、湛江、江门、肇庆、云浮、阳江、茂名、中山、惠州、钦州、广西、北海、玉林、柳州、百色、贵港、梧州、柳州、桂林、南宁、贵州、遵义、六盘水、贵阳、海口、海南、三亚、琼山、文昌、琼海、万宁、通什、儋州、许昌、河南、三门峡、郑州、新乡、鹤壁、安阳、濮阳、焦作、商丘、洛阳、漯河、平顶山、南阳、信阳、济源、周口、驻马店、开封、沧州、河北、保定、石家庄、邯郸、邢台、衡水、秦皇岛、廊坊、承德、张家口、唐山、佳木斯、黑龙江、哈尔滨、齐齐哈尔、大兴安岭、大庆、鹤岗、牡丹江、伊春、宜昌、湖北、荆门、黄石、咸宁、荆州、鄂州、孝感、黄冈、十堰、随州、仙桃、天门、武汉、潜江、襄樊、益阳、湖南、常德、长沙、永州、怀化、岳阳、株洲、郴州、衡阳、湘潭、昭阳、张家界、长春、吉林、白城、吉林、四平、辽源、通化、白山、松原、扬州、江苏、苏州、无锡、常州、镇江、泰州、盐城、淮阴、宿迁、连云港、徐州、南京、南通、景德镇、江西、鹰潭、新余、萍乡、赣州、上饶、抚、宜春、九江、吉安、南昌、辽阳、辽宁、新、营口、盘锦、大连、锦州、铁岭、抚顺、丹东、鞍山、沈阳、本溪、朝阳、葫芦岛、赤峰、内蒙古、呼伦贝尔、呼和浩特、包头、银川、宁夏、石嘴山、西宁、青海、滨州、山东、青岛、日照、临沂、济宁、威海、莱芜、枣庄、菏泽、泰安、济南、烟台、潍坊、淄博、东营、德州、聊城、阳泉、山西、太原、朔州、晋城、临汾、大同、延安、陕西、宝鸡、渭南、铜川、西安、咸阳、上海、自贡、四川、南充、攀枝花、宜宾、泸州、绵阳、成都、德阳、天津、香港、乌鲁木齐、新疆、石河明、舟山、浙江、宁波、绍兴、金华、嘉兴、湖州、杭州、丽水、温州、重庆 |
|
| |
| |
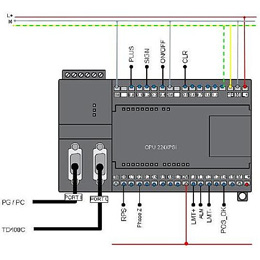
| 读英语原文,理解西门子PLC缩写指令 |
| 双击自动滚屏 |
恒邦PLC培训2016-11-03 22:35:44 阅读:4371次 关注微信公众号 PLC958,获取最快捷,最有用的技术资讯 |
|
|
|
|
指令( 英文全称意思 ) :指令含义
1 、LD ( Lode 装载 ) :动合触点
2、LDN ( Lode Not 不装载 ) : 动断触点
3、A ( And 与 动合) : 用于动合触点串联
4、AN ( And Not 与 动断 ) :用于动断触点串联
5、O ( Or 或 动合 ) :用于动合触点并联
6、ON ( Or Not 或 动断 ) : 用于动断触点并联
7、= ( Out 输出 ) : 用于线圈输出
8、OLD ( Or Lode): 块或
9、ALD ( And Lode): 块与
10、LPS ( Logic Push ) :逻辑入栈
11、LRD ( Logic Read ) :逻辑读栈
12、LPP ( Logic Pop ) :逻辑出栈
13、NOT ( not 并非 ) :非
14、NOP ( No Operation Performed ) : 无操作
15、AENO ( And ENO ) : 指令盒输出端ENO相与
16、S ( Set 放置 ) : 置1
17、R ( Reset 重置,清零 ) :清零
18、P ( uP 上升) :正跳变
19、N ( dowN 下降) :负跳变
20、TON ( On_Delay Timer ) :通电延时
21、TONR ( Retentive On_Delay Timer ) : 有记忆通电延时型
22、TOF ( Off_ Delay Timer ) :断电延时型
23、CTU ( Count Up ) : 递增计算器
24、CTD ( Count Down ) : 递减计数器
25、CTDU ( Count Up/ Count Down ) :增减计数器
26、ADD ( add 加 ) : 加
注意 //ADD_I (_ I 表示整数) ADD_DI( DI表示双字节整数)ADD-R(R 表示实数)它们都是加运算只是数的大小不同。
27、SUB ( Subtract 减去,减少) :减
28、MUL ( Multiply ) : 乘
29、DIV ( Divide ) : 除
30、SQRT ( Square root ) : 求平方根
31、LN ( Napierian Logarithm 自然对数 ) : 求自然对数
32、EXP ( Exponential 指数的 ) : 求指数
33、INC_B ( Increment 增加 ) : 增1
34、DEC_B ( Decrement 减少 ) : 减1
35、WAND_B ( Word and 与命令 ) :逻辑与
//其中_B代表数据类型 还有W(字节)、DW双字后面几个都是这样的。
36、WOR_B ( Word or 或命令) : 逻辑或
37、WXOR_B ( Word exclusive or 异或命令) :逻辑异或
38、INV_B ( Inverse 相反 ) : 取反
39、MOV _B ( Move 移动 ) : 数据传送
40、BLKMOV_B ( Block Move 块移动) :数据块传送
41、SWAP ( Swap 交换 ) : 字节交换
42、FILL ( Fill 填充 ) : 字填充
43、ROL_B ( Rotate Left 循环 向左) :循环左移位
44、ROR_B ( Rotate Right 循环 向右) : 循环右移位
45、SHL_B ( Shift Right 移动向左) :左移动
46、SHR_B ( Shift Right 移动向右 ) : 右移动
47、SHRB ( Shift buffer 移动缓存) :寄存器移位
48、STOP ( Stop 停止 ) : 暂停
49、END /MEND ( End /M end ) : 条件/无条件结束
50、WDR ( Watch dog reset ) : 看门狗
51、JMP ( Jump 跳) :跳转
52、LBL ( Location 位置 ) : 跳转标号
53、FOR ( for 循环 ) : 循环
54、NEXT ( next 再下去) :循环结束
55、SBR ( Subprogram Regulating子程序控制 ) : 子程序调用
56、SBR_T ( Subprogram Regulating Take ) : 带参数子程序调用
57、SCR ( Sequence Control 顺序控制 ) : 步开始
58、SCRT ( Sequence Control Transfer 顺序控制转移 ) : 步转移
59、SCRE ( Sequence Control End 顺序控制结束 ) : 步结束
60、AD_T_TBL ( Add data to table 添加数据到表格中) : 填数据表
61、FIFO ( First in First out 先进先出 ) : 先进先出
62、LIFO ( Last in First out 后进先出 ) :后进先出
63、TBL_FIND ( Table Find 表格查找 ) : 表查找
64、BCD_I ( Binary Coded Decimal _I 二进制编码的十进制 ) :BCD 码转整数
65、I_BCD ( I_ Binary Coded DecimaL ) :整数转BCD码
66、B_I ( Bit 转整数 int ) :字节转整数
67、I_B ( int bit ) :整数转字节
68、DI_I ( Double _ int ) :双整数转整数
69、I_DI ( // ) :整数转双整数
70、ROUND ( Round 完整的 ) : 实数转双整数
71、TRUNC ( Turn ceiling转换上限 ) :转换32位实数整数部分
72、DI_I ( // ) :双整数转实数
73、ENCO ( Encode 编码) : 编码
74、DECO ( Decode 译码) : 译码
75、SEG ( Segment decoder分断译码器 ) : 七段显示译码器
76、ATH ( ASCII码 turn hex ) : ASCII码转16进制
77、HTA ( // ) : 16进制转ASCII码
78、ITA ( // int ) : 整数转ASCII码
79、DTA ( // double ) : 双整转ASCII码
80、RTA ( // real ) : 实数转ASCII码
81、ATCH ( ) : 中断连接
82、DTCH ( Down ) : 中断分离
83、HDEF ( High ) : 高速计数器定义
84、HSC ( High Speed Counter 高速计数器 ) :启动高速计数器
85、PLS ( Pulse 脉冲 ) : 脉冲输出
86、READ_ RTC ( Read real time clock 读实时时钟 ) :读实时时钟
87、SET_RTC ( Set real time clock ) : 写实时时钟
88、XMT ( Transmitter ) : 自由发送
89、RCV ( Receive 接收 ) : 自由接收
90、NETR ( Net read 网络读 ) : 网络读
91、NETW ( Net write 网络写 ) : 网络写
92、GET_ADDR ( Get address 获取地址 ) : 获取口地址
93、SET_ADDR ( Set address 设置地址 ) : 设定口地址
94、PID ( Proportional Integral Differential 比例、积分、微分 ) :比例积分微分调节器 |
|
|
|
|
|
|
|
|
|














 咨询PLC培训请
咨询PLC培训请